
Les 5 grandes étapes de l’histoire de la robotique
De tous temps, l’homme a essayé de concevoir des machines qui se rapprocheraient du vivant, qui auraient sa forme physique et pourraient travailler, calculer, raisonner à sa place. Cette histoire de la robotique commence avec les premiers modèles d’automates et va jusqu’aux robots modernes qui peuvent se déplacer seuls et nous battre aux échecs.
En effet, la robotique se définit comme l’ensemble des techniques mises au point pour fabriquer des robots ainsi que des machines automatisées. Cette technologie aux multiples techniques a connu de nombreuses étapes, ce qui lui a permis de devenir une science incontournable.
Cet article nous amène à étudier les grandes étapes de l’histoire de la robotique, qui a considérablement aidé à modifier nos comportements. Pour ce faire, nous allons mettre en lumière son histoire, ses origines, ainsi que ses enjeux d’avenir.
Nous sommes loin des robots de Terminator, pourtant, les automates sont les premiers représentants de la longue histoire de la robotique. Et ils remontent à l’Antiquité grecque, durant laquelle on signale plusieurs artefacts qui bougent tout seuls. Le premier automate que l’on peut citer est le célèbre pigeon volant d’Archytas de Tarente. Les historiens le considèrent comme la première machine volante autonome de son temps. S’ajoute à cela, les scènes théâtrales amovibles créées par Héron d’Alexandrie.
C’est ensuite au génie de Leonard de Vinci que l’on doit les avancées de la Renaissance en matière de mécanismes. Le travail du florentin a consisté à mettre au point le premier androïde (robot figurant un humain), un chevalier capable de coordonner les mouvements de ses bras, de ses jambes et de ses mâchoires, de s’asseoir et de se lever.
Il faut attendre les XVIIIe et XIXe siècles pour atteindre l’âge d’or des automates, marqué par l’apparition des premiers robots industriels. Jacques de Vaucanson éblouit son petit monde avec un canard qui peut caqueter, manger, nager… et digérer sa nourriture ! Pendant ce temps, les robots-joueurs d’échecs se multiplient (Edgar Allan Poe en a longuement décrit un), insinuant le doute sur leur fonctionnement : y’a-t-il un homme caché dans le mécanisme ?
Les automates, liés aux principes de l’horlogerie, représentent les premiers pas des inventeurs dans la direction du fantasme du robot. Ils sont les marches préliminaires dans l’histoire de la robotique, des marches qui courent sur plus de 20 siècles. C’est ensuite à l’ère moderne que ce domaine prend son essor.
Histoire de la robotique : De l’Antiquité au XXe siècle : les automates
Nous sommes loin des robots de Terminator, pourtant, les automates sont les premiers représentants de la longue histoire de la robotique. Et ils remontent à l’Antiquité grecque, durant laquelle on signale plusieurs artefacts qui bougent tout seuls, comme le pigeon volant d’Archytas de Tarente et les scènes théâtrales amovibles créées par Héron d’Alexandrie.
C’est ensuite au génie de Leonard de Vinci que l’on doit les avancées de la Renaissance en matière de mécanismes. Le Florentin met au point le premier androïde (robot figurant un humain), un chevalier capable de coordonner les mouvements de ses bras, de ses jambes et de ses mâchoires, de s’asseoir et de se lever.
Il faut attendre les XVIIIe et XIXe siècles pour atteindre l’âge d’or des automates. Jacques de Vaucanson éblouit son petit monde avec un canard qui peut caqueter, manger, nager… et digérer sa nourriture ! Pendant ce temps, les robots-joueurs d’échecs se multiplient (Edgar Allan Poe en a longuement décrit un), insinuant le doute sur leur fonctionnement : y’a-t-il un homme caché dans le mécanisme ?
Les automates, liés aux principes de l’horlogerie, représentent les premiers pas des inventeurs dans la direction du fantasme du robot. Ils sont les marches préliminaires dans l’histoire de la robotique, des marches qui courent sur plus de 20 siècles. C’est ensuite à l’ère moderne que ce domaine prend son essor.
Les premiers robots de l’histoire de la robotique
Les travaux des biologistes (sur les mécanismes du corps humain) et des psychologues sur (sur les secrets du cerveau et de la conscience) poussent les ingénieurs à développer des systèmes qui reproduisent ces hypothèses scientifiques nouvelles. Ils fabriquent des machines-animales dotées de capacités d’apprentissage :
- Le chien électrique de Hammond et Miessner (1915)
C’est en 1915 que les ingénieurs Hammond et Miessner ont réussi à concevoir ce célèbre chien électrique. Sa technologie lui permet d’adapter son comportement en fonction des événements perçus. Il est composé d’une boîte, de roues et de capteurs lui permettant de se diriger vers la lumière. Cette invention fit grand bruit dans le monde scientifique et a eu un très fort impact dans l’histoire de la robotique.
- Les tortues cybernétiques de Grey Walter (1950)
En 1950, le neurophysiologiste William Grey Walter inventa deux robots capables de se déplacer de manière autonome. Ils ont été mis au point à l’Institut de neurologie Burden. Ces inventions pionnières dans la recherche de la vie artificielle, ont largement contribué au développement de la cybernétique.
- Le renard électronique de Ducrocq (1953)
Conçu en 1953 par le cybernéticien français Albert Ducrocq, le renard électronique est la première représentation des machines expérimentales. Surnommé « Job », cette machine a la capacité d’éviter tout obstacle au niveau de son environnement.
Il est temps d’explorer la différence entre automates et robots – car ces animaux sont bien des avatars de la seconde catégorie. En effet, jusqu’au XXème siècle, le fonctionnement des automates dépendait des programmes préétablis par leurs concepteurs. Pour fonctionner, ils disposaient de l’équivalent de nos organes moteurs. Cependant, l’avènement des robots a changé le cours des choses. Ces derniers disposent de capteurs de sons et de luminosité, qui leurs permettent de modifier leurs paramètres de vitesse. Ainsi, Ils peuvent facilement changer leurs comportements en fonction des situations.
Nous pouvons donc déduire que les automates obéissent à des systèmes préétablis qui font bouger leurs mécanismes/organes, tandis que les robots sont dotés de capteurs (des organes sensoriels) qui, en recueillant les données de l’environnement, influencent leur fonctionnement.
On parle aussi de cybernétique : c’est le premier pas, dans l’histoire de la robotique, vers la conception d’une intelligence artificielle, indissolublement liée à l’idée même du robot.
Histoire de la robotique : L’intelligence artificielle
Ceux qui ont vu le film Imitation Game savent que le Britannique Alan Turing a inventé l’ancêtre de l’ordinateur durant la Seconde Guerre mondiale. Certainement ont-ils entendu parler du « test de Turing » : une méthode destinée, dans les années 1950, à mesurer la présence d’une conscience ou d’une intelligence au sein d’une machine.
C’est John McCarthy qui, en 1956, forge l’expression « intelligence artificielle » et en signe l’avènement. Ce domaine de la recherche a pour but de modéliser la complexité de l’intelligence humaine au sein d’une machine, qui deviendrait de fait évolutive. C’est le concept même de l’ordinateur : pouvoir produire du raisonnement sans avoir besoin d’organes moteurs.
En 1963, l’architecture de raisonnement General Problem Solver, de Newell et Simon, peut résoudre des problèmes complexes. En 1971, le robot virtuel Shrdlu de Winograd peut dialoguer avec son concepteur. De son côté, le Mycin de Buchanan et Shortliffe, en 1984, est capable de poser un diagnostic médical plus rapidement (et avec plus de précision) qu’un praticien humain.
De nos jours, l’intelligence artificielle facilite la vie des gens, et présente de nombreuses innovations dans le domaine de l’image et de la cinématographie.
Histoire de la robotique : Animats et rovers
Les animaux artificiels, ou animats, font l’objet d’une recherche à part entière dans le domaine de la cybernétique : l’idée est de calquer les mécanismes du vivant, de comprendre comment l’on peut parvenir à reproduire l’organisme animal. Ce fantasme est tout aussi ancien que celui du robot humanoïde, la preuve avec le pigeon volant antique.
Le développement des animats suit deux ambitions : d’une part, la capacité d’apprentissage des machines. D’autre part, la reproduction de la mécanique du mouvement animal : arthropodes, reptiles, amphibiens et leurs modes de déplacement inspirent les roboticiens. Brachiator, un robot de l’université de Nagoya, imite par exemple les sauts du singe gibbon de branche en branche.
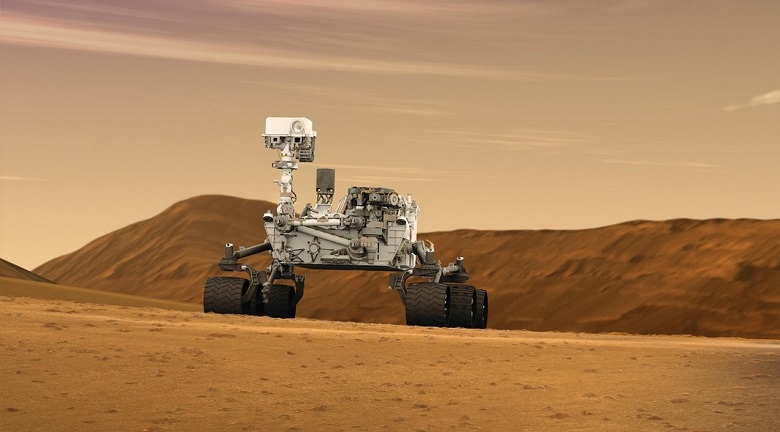
D’un autre côté, les scientifiques travaillent à la fabrication de rovers, des véhicules (sortes de drones améliorés) destinés à explorer la surface des planètes en toute autonomie, de façon à visiter des lieux hostiles pour l’homme. Ces machines peuvent se déplacer, effectuer et modifier des mesures, prélever des échantillons. Le modèle le plus célèbre est le récent Curiosity, qui s’est posé sur Mars en 2012.
Histoire de la robotique : Les robots humanoïdes
Au fil du temps, l’invention d’automates capables de surpasser les humains s’est transformée d’une idée en réalité. Pour concevoir un robot ressemblant à l’humain, ce qui fut toujours plus ou moins l’ambition de l’histoire de la robotique, il faut lui donner l’aptitude de marcher sur ses deux jambes. Le chevalier de Leonard de Vinci (1495) pouvait bouger ses bras et s’asseoir, mais pas se déplacer. De sorte que la maîtrise de la bipédie fut un exploit retentissant.
Le premier robot à marche bipède, capable de se déplacer de manière rudimentaire est le WABOT-1 de l’université de Waseda, en 1973. Suivent le WHL-11 de Hitachi (1985), les modèles E0 à E6 de Honda (entre 1986 et 1993) et les P1 à P3 du même constructeur (1992-1997) qui peuvent marcher comme des humains et même monter des escaliers.
Dans les années 2000, les androïdes de Honda courent et sautillent sur un pied, manipulent des objets délicatement (ils peuvent remplir un gobelet de liquide sans en renverser), communiquent en langage des signes. Sony entre dans la partie et développe de petits robots humanoïdes.
En France, la naissance de Nao, création de la société française Aldebaran Robotics, en 2006, marque une étape fondamentale dans l’histoire de la robotique. Car ce petit Nao incarne le fantasme ancien du robot : de forme humanoïde, il est autonome, programmable à l’infini, peut aider à des tâches simples et servir de plate-forme pédagogique dans le cadre de l’enseignement ou de la recherche.
C’est le point de départ du développement de machines humanoïdes d’assistance (Twendy One en 2007, Roméo en 2012), puis de robots fabriqués dans un souci de réalisme maximal : ainsi le Kobian de l’université Waseda capable de modifier ainsi que de reproduire les expressions humaines, ou le Geminoid F de l’université d’Osaka.

L’histoire de la robotique et ses enjeux d’avenir
La robotique est une science qui a permis de radicalement modifier notre quotidien. Elle est considérée comme une technologie en pleine expansion, et ce, au niveau de nombreux domaines. Nous pouvons citer à titre d’exemple : l’industrie, la défense militaire, la médecine, ou encore la domotique.
Ainsi, il convient de se demander si les robots représentent une véritable menace pour l’humanité, ou au contraire, de bons amis facilitant notre quotidien ?
Depuis toujours, l’histoire de la robotique est indissociable d’une certaine fascination des roboticiens pour la nature et pour le fonctionnement du vivant, qu’ils tentent de reproduire avec leurs propres outils. La littérature (le cycle des robots d’Isaac Asimov) et le cinéma de science-fiction s’en sont régulièrement inspirés dans des scénarios souvent catastrophistes.
Pour autant, ce n’est pas demain qu’une intelligence artificielle façon Skynet prendra le contrôle de la planète avec des armées de cyborgs autonomes. L’avenir immédiat de la robotique est plus modeste, et se divise en deux objectifs :
- Concevoir des créatures qui reproduisent les mécanismes qui concourent à la survie des animaux, afin d’en apprendre toujours plus sur les modèles évolutionnistes.
- Créer des humanoïdes adaptatifs et autonomes qui pourront s’avérer utiles dans des situations hostiles à l’homme : travailler dans les fonds sous-marins, installer une base lunaire, etc.
Et, qui sait, peut-être aurons-nous bientôt, à domicile, des droïdes qui ressembleront à C-3PO et R2D2 de Star Wars ?




